In a group of three, a proposal was made to create a robotic, MIDI-powered instrument based on the concept of striking wind chimes to produce sound. Several objectives were to be implemented in the creation of a design: - Must be able to play chords (strike three notes/chimes at once): To introduce versatility into the instrument, the autochimes concept should be able to play chords within the range of notes installed in the overall assembly. - Must have a range of at least one octave: Using copper tubing, strike a reasonable balance between ease of listening (not too high, not too low) to the instrument while also accounting for the physical footprint (i.e., tubing must be of specific length to produce notes with n Hz frequency.) - Must be reasonably fast (play 60BPM melodies): Basic design constraint to improve usability and versatility of instrument in real-world settings. Both the actuator and control system assemblies must be capable of supporting this.
The concept of Robotic Autochimes was inspired by several different projects (some of which included below) in tandem with work established in a previous course, "Musical Robotics":
A conceptual instrument, mechanically incomplete and pending prototyping, was built but not made to the specification of the original design (“Complex Actuator” Design.) Due in-part to a lack of manpower and time constraints, this design was ultimately modified for the purposes of getting a prototype finished in time for presentations, resulting in a drastically simplified striker assembly (“Simple Actuator” Design.) The resulting prototype was not tested, does not fully satisfy the pre-defined objectives, and was of questionable build quality due to assembly during the eleventh hour.
Several lessons were learned by the conclusion of this project, ranging from the abandon the original “Complex Actuator” Design to the poor construction of the prototype.
Lack of communication & coordination: Despite having mechanical engineer majors in my group, it became apparent during the last few weeks of the project that I would be alone in conducting design work.
Misplaced priorities: As the sole mechanical designer of this project, I believe I was influenced by the need for “flashy” and complex actuation versus something that might have been simpler and more effective in achieving the original objectives.
Need for rapid prototyping and testing of new concepts: A design approach that might have made a difference would have been in taking small steps and confirming functionality/theory through the use of real-world prototypes, rather than creating a singular, complex assembly and hoping for the best when using untested methodologies.
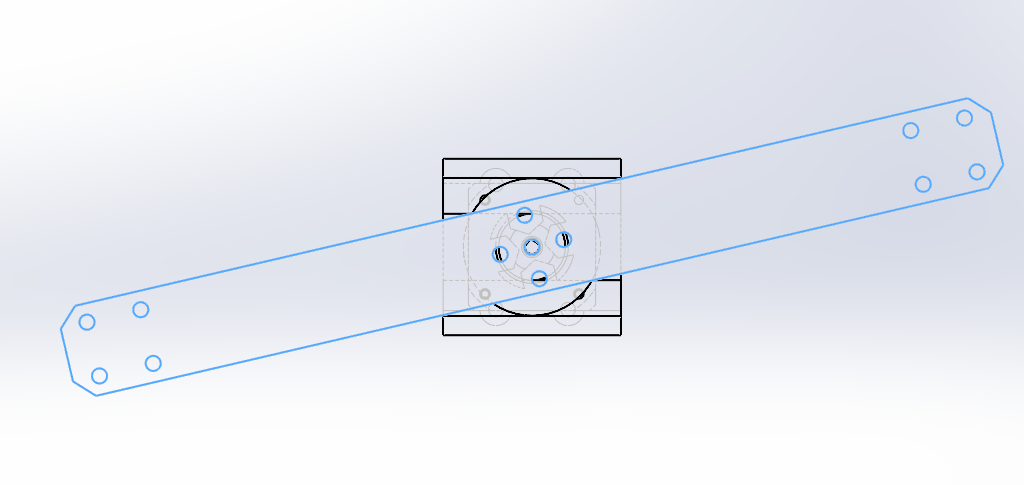
Original Actuation Concept, Top
Original Actuation Concept, Isometric
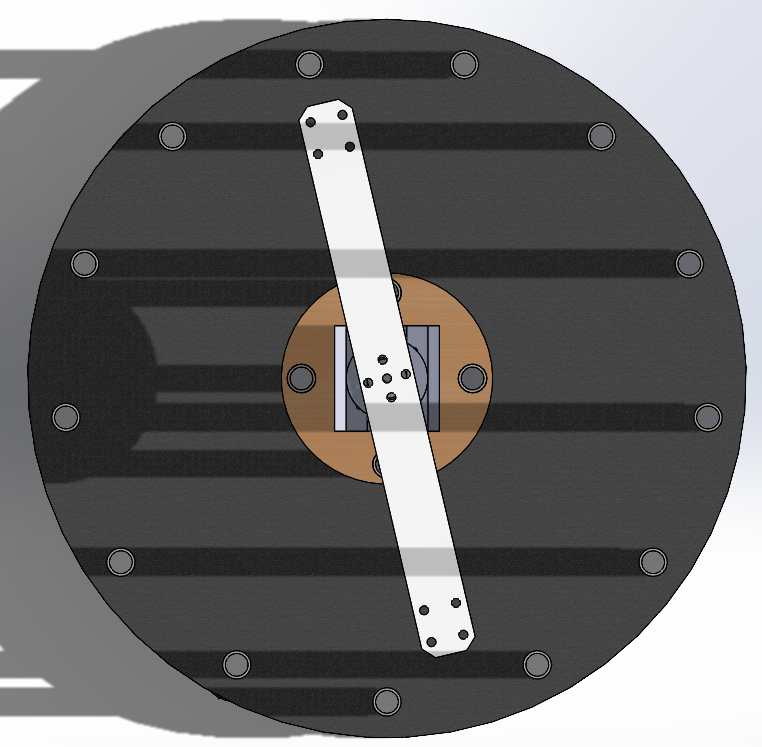
Final Actuation Concept, Top
Final Actuation Concept, Overall
This project provided me with valuable insight into managing team resources, the need for frequent check-ins/temperature checks on progress, building on known-good and/or known-tested design methodologies and managing expectations. In understanding the issues with this project, I hope to be more reliable and of greater use to future teams I might find myself in.